4.系统构成与工作原理:
4.1 构成 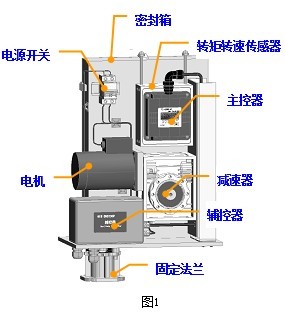
LM-0505C物位机械手的总体构成与布局如图1所示。
密封箱:密封箱内放置的是钢缆、卷轮及缠绕机构,它与其它装置是密封隔离的。因此,物位机械手可以直接安装在被测仓的顶部位置。
转矩转速传感器:用于感应测量钢缆的力矩变化以及钢缆的收放长度与速度的变化量。
主控器:根据转矩转速传感器的信号进行智能化的控制与保护,同时具备就地手操功能及显示功能,不但方便地进行就地调试和检修,也能直接地进行就地控制测量。
辅控器:用于提供主控器所需的电源、电机驱动及信号输出回路,同时提供用户的控制接线端子。
4.2 工作原理
LM-0505C物位机械手的工作过程如下:
当按下“测量开始”按钮后,主控器发出降锤指令,物位机械手开始放锤,物位信号开始变化;当锤探测到介质时,作用在钢缆上的拉力减小,转矩转速传感器感应到力矩变化后,发出升锤指令,物位机械手开始升锤,物位信号不再变化,即此时的物位值就是实际测量的料位;当重锤回复到初始位置即顶位时停止动作,本次测量完成。
|
